



Me ka hoʻomau mau ʻana o ka logistics automation a me ka intellectualization, ʻaʻole i kaupalena ʻia nā ʻoihana i ka hoʻonui ʻana a me ka hoʻololi ʻana o kahi laina hana hoʻokahi a hale kūʻai paha. No laila, ke wikiwiki nei ka logistic o ka mea kanu holoʻokoʻa, a ke hiki mai nei ka wā o ka logistic nui. Eia nō naʻe, i ke ʻano o ka mākeke robot mobile o kēia manawa, ma muli o ka nele o ka hoʻomohala ʻana i ka ʻoihana, paʻakikī loa i ka mea hana hoʻokahi e hoʻopau kūʻokoʻa i ka ʻoihana holoʻokoʻa o ka laina hana, ka waiho ʻana a me ka hale kūʻai ʻaoʻao laina. No laila, ʻo ka hui pū ʻana o ke kūpaʻa a me ke ākea i lilo i koho hoʻolālā o nā mea hana robot mobile i kēia manawa.

ʻO ka hui hoʻolālā ma waena o HEGERLS a me Hairou i ka hana hou
I nā makahiki i hala iho nei, ua hoʻolaha ʻo Hebei Walker Metal Products Co., Ltd. (ʻo ia ka inoa nona iho: HEGERLS) a me Hairou Innovation i kahi hui hoʻolālā, a hui pū ʻia i ka ʻenehana ʻenehana mua loa SLAM multi-layer bin koho ʻana i ka robot AGV, e hana ana i ka hoa maikaʻi loa no ka. ka hale kūʻai ʻaoʻao ʻaoʻao o ka hale hana, e wehe ana i kahi au hou o ka lawelawe ʻana i nā ʻoihana, a hui pū i ka hoʻonui ʻana i ka ʻoihana logistics naʻauao.

No Hebei Walker Metal Products Co., Ltd. [Own brand: HEGERLS]
ʻIke ʻia i ka makahiki 1996, ʻo Hebei Walker Metal Products Co., Ltd. kahi hui mua i hana i ka ʻoihana papa ma Kina ʻĀkau. I ka makahiki 1998, ua hoʻomaka ʻo ia e komo i ke kūʻai ʻana a me ka hoʻokomo ʻana i nā hale kūʻai a me nā lako logistic. Ma hope o 20 mau makahiki o ka hoʻomohala ʻana, ua lilo ia i mea hoʻolako hoʻohui hoʻokahi o ka hale kūʻai a me ka logistic e hoʻohui i ka hale kūʻai a me ka hoʻolālā papahana logistic, nā lako a me nā lako hana, kūʻai aku, hoʻohui, hoʻonohonoho, komisina, hoʻomaʻamaʻa limahana mālama hale kūʻai, ma hope- lawelawe kūʻai, a me nā mea ʻē aʻe, a he ʻoihana ʻenehana kiʻekiʻe hoʻi ia e kālele ana i ka hana akamai a me ka logistic naʻauao. Hoʻopili ʻia kāna ʻoihana i nā papa hale kūʻai: nā pahu kaʻa Kaʻa keʻa, stereoscopic warehouse shelf, attic shelf, floor shelf, cantilever shelf, mobile shelf, fluent shelf, drive in shelf, gravity shelf, medium shelf, dense shelf, steel platform, anti-corrosion papa, etc; Waihona stereoscopic hale kūʻai: shuttle stereoscopic hale kūʻai, beam stereoscopic hale kūʻai, attic stereoscopic hale kūʻai, papahele ʻano stereoscopic hale kūʻai, cantilever stereoscopic hale kūʻai, mobile stereoscopic hale kūʻai, fluent stereoscopic hale kūʻai, hoʻokele i ka hale kūʻai stereoscopic, gravity stereoscopic hale kūʻai, etc; ʻO nā lako mālama naʻauao: kaʻa kaʻa, kaʻa kaʻa ʻelua ala, kaʻa kaʻa kaʻa ʻehā, stacker, kaʻa sub main, elevator, naʻauao lawe a hoʻonohonoho ʻōnaehana, pahu hoʻololi, pallet, hale mālama mālama, general AMR controller, automatic forklift, etc. ʻO ka hale kūʻai a me ka ʻōnaehana mālama a me nā ʻōnaehana: kaʻa kaʻa kaʻa + forklift, kaʻa kaʻa kaʻa + stacker, subbus + elevator, kaʻa kaʻa kaʻa ʻehā ala, AS / RS stacker, ʻōnaehana akamai a me ka hoʻokaʻawale ʻana, nā polokalamu ʻōnaehana ʻenehana ʻike a me ka hopena ʻike naʻauao, e hāʻawi. hoʻokahi kū hoʻokahi a me nā lawelawe no nā mea kūʻai aku ma nā ʻoihana āpau, a e paipai i ka hoʻololi ʻana a me ka hoʻonui ʻana i ka ʻikepili ʻenehana, ka helu helu a me ka naʻauao.
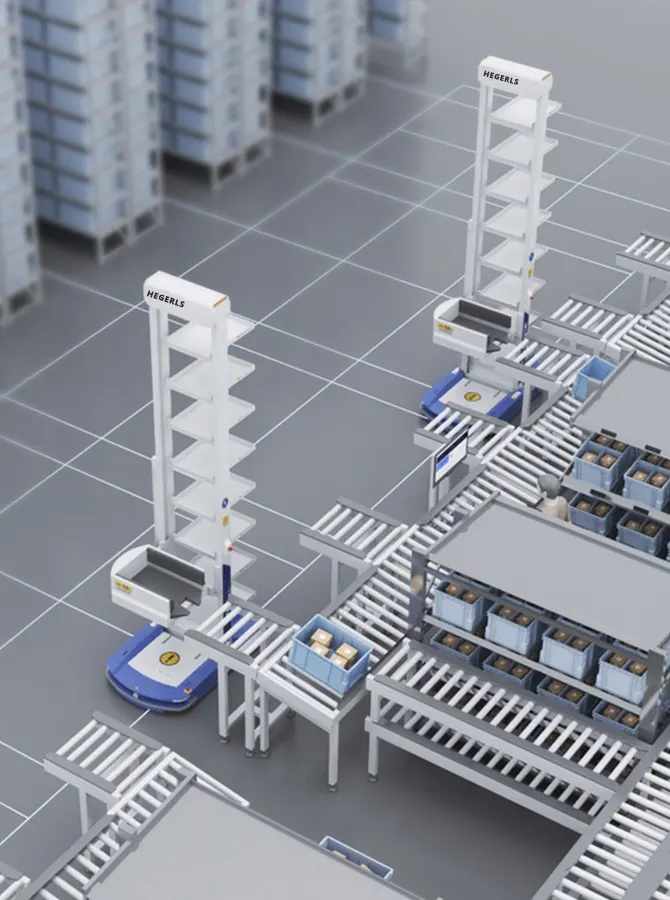
HEGERLS – laser SLAM multi-layer bin e koho ana i ka robot AGV
ʻO ka ʻenehana ʻenehana ʻenehana mua SLAM multi-layer bin e koho ana i ka robot AGV, i hoʻomohala pū ʻia e HEGERLS a me Hairou Innovation, hiki ke ʻike i ka hoʻokele laser SLAM. Ua lako me ka SRC kumu hooponopono, a he eha hana koʻikoʻi. Hoʻohui ia i ka hoʻokele, palekana, a me nā hana he nui. Hoʻomaopopo ʻo ia i ka hoʻopaʻa ʻana maʻalahi, ke koho pololei ʻana a me ka waiho ʻana, a me ka lawelawe pono ʻana. E lilo ia i hoa maikaʻi loa o ka hale kūʻai ʻaoʻao ʻaoʻao o ka hale hana, e hiki ai i ka hana akamai. I kēia mau makahiki i hala iho nei, ua hoʻohuli ʻia kēia robot hou i ka manaʻo o nā ʻoihana nui a me nā ʻoihana liʻiliʻi, a ua hoʻohana ka hapa nui o lākou iā ia, i hoʻomaikaʻi ʻia a aloha ʻia.
Ua kapa ʻia ʻo SLAM (Simultaneous Localization and Mapping) i ka hoʻonohonoho manawa maoli a me ka ʻenehana kūkulu palapala. Loaʻa i ka robot nā hana o ka ʻohi naʻauao a me ka lawelawe ʻana, ka hoʻokele autonomous, ka pale ʻana i ka pilikia a me ka hoʻouka ʻana. Nānā ka laser SLAM i ke kaiapuni o ke kaiapuni no ke kūkulu ʻana i ka palapala ʻāina kiko kiko o ke kaiapuni, a laila hoʻohālikelike i ka palapala ʻāina kiko kiko i kūkulu ʻia me ke ao kiko manawa maoli i nānā ʻia e ka laser no ke kūlana a me ka hoʻokele. ʻO ka ʻenehana ʻenehana laser SLAM multi-layer material box e kiʻi ana i ka latent AGV robot he pahu hoʻopaʻa pahu ʻano pahu hana kiʻekiʻe i hoʻohui ʻia me ka polokalamu kiʻekiʻe a me ka ʻenehana loea. Hoʻolālā kūikawā ia no nā hiʻohiʻona hale kūʻai ʻaoʻao laina, a hoʻohana i ka ʻenehana hoʻokele laser SLAM e hoʻokō i ke kūlana kūpono. ʻO ka ʻenehana ʻenehana laser SLAM multi-layer material box picking latent AGV robot hiki ke neʻe i mua a i hope, a hiki ke hoʻololi i kekahi kihi ma kahi. I ka manawa like, loaʻa iā ia nā hiʻohiʻona o ke kūpaʻa kiʻekiʻe a me ka hana kiʻekiʻe. ʻO ka ʻōnaehana pale pale palekana kūpono a me nā ana palekana palekana ikaika a passive o ka robot hiki ke hoʻomaopopo i ka kaʻawale ʻana o ke kanaka a me ka mīkini. Ke komo hewa ʻole ka poʻe i ka wahi robot, hiki iā lākou ke ʻike naʻauao, hoʻāla a ʻike i ka pale pani pani. Eia kekahi, hiki i ka ʻōnaehana polokalamu i hoʻohālikelike ʻia me ka ʻenehana ʻenehana laser SLAM multi-layer bin picking latent AGV robot hiki ke mālama i nā pono i hoʻopuka ʻia e nā ʻōnaehana pili ʻoihana, i kūpono loa no ka hoʻokele maʻalahi o nā hale kūʻai ʻaoʻao laina. Hoʻopili maʻalahi ka ʻōnaehana polokalamu a hōʻiliʻili i ka ʻike waiwai ma ke kaʻina holoʻokoʻa, hoʻokō pololei a hoʻokō pono i ka loaʻa ʻana a me ka hoʻouna ʻana, ʻohi ʻana a me ka hāʻawi ʻana i nā ʻōlelo aʻoaʻo, ʻike i ka hoʻokele akamai o ka hale kūʻai ʻaoʻao laina, ʻike i ka ʻohi pololei ʻana o nā waiwai mai ka hale kūʻai a me ka ka mālama pono ʻana i nā ʻāpana waiwai, a kōkua i nā mea kūʻai aku e hoʻokō i ka hana lean.

HEGERLS - ʻo ka laser SLAM multi-layer bin e koho ana i ka robot AGV e kālele ana i ka hoʻoponopono ʻana i nā wahi ʻeha
❑ Hoʻolālā kanaka nui
ʻO ka ʻenehana ʻenehana laser SLAM multi-layer material box picking latent AGV robot i hoʻolālā superhuman e hoʻokō i ka hoʻokiʻekiʻe manuahi o 0.4 m ~ 1.86 m, hoʻololi i ke ʻano hana manual, hoʻohālikelike i nā kiʻekiʻe hana he nui, hana i kahi ʻike hana ʻoluʻolu, a hana i ke kanaka- ʻoi aku ka launa pū ʻana o ka lolouila.
❑ Hoʻolālā maʻalahi loa
Ma ka pane ʻana i ka hoʻololi ʻana o ka hana, ʻo ka ʻenehana ʻenehana laser SLAM multi-layer bin koho latent AGV robot e hoʻololi i ka hoʻololi maʻalahi o ka pae hana, me ka ʻole o ka hoʻokele code ʻelua-dimensional, haki i nā palena laina hui kuʻuna, a ʻike i ka hana discrete a hiki wawe ka hana akamai.
❑ ʻO ka hoʻopaʻa maʻalahi loa
He paʻakikī a ʻokoʻa ka ʻoihana o ka hale hana, a ʻokoʻa hoʻi ke koi no nā lako logistic. ʻO ka ʻenehana ʻenehana laser SLAM multi-layer bin e ʻohi ana i ka latent AGV robot hiki ke hoʻopaʻa maʻalahi me nā ʻano mea like ʻole, e like me ka roller, shelf, latent AGV, artificial workstation a me nā papa hana ʻē aʻe, hiki ke lawe ʻia a waiho manuahi ʻia, a hiki ke hoʻopaʻa ʻia me ka pau ʻole. e like me kou makemake, me ka laulā o nā hiʻohiʻona noi.
❑ Ka lawe ʻana a me ka waiho ʻana
Hoʻohui ʻia ka laser SLAM multi-layer bin robot support system, a hoʻohana ʻia ʻo AI visual e hoʻokō pono i ka ʻohi ʻana a me ka waiho ʻana, ka ʻohi akamai a me ka lawelawe ʻana i nā mea, a kōkua i ka hana ʻoi loa.
❑ Hoʻohana iā ʻoe iho
ʻO ka chassis o ka ʻenehana ʻenehana laser SLAM multi-layer bin picking latent AGV robot ua lako me nā huila kaʻa a me nā huila hoʻokele. Hoʻohana ʻia ke ʻano ʻokoʻa huila ʻelua, kahi kūpono i ka holo ʻana o ka robota a me ke ala e hoʻololi ai i nā wahi haiki. Hiki i ka lopako ke neʻe i mua a i hope me ka wikiwiki, a hiki ke hoʻololi a hoʻololi i ke ala ma kēlā me kēia kihi ma kahi kumu. ʻO ka ʻepekema ʻenehana a me ka ʻenehana laser SLAM multi-layer material box picking latent AGV robot e hahai ana i ka lawelawe ʻana a me nā ʻōkuhi hele i hoʻopuka ʻia e ka ʻōnaehana hoʻonohonoho kamepiula, hiki ke hoʻololi i ka wikiwiki holo, kuhikuhi, braking, etc., a kākoʻo i ka hōʻike ʻana i ke kūlana hele i ka ʻōnaehana hoʻonohonoho hoʻonohonoho, i mea e hoʻokō ai i ka lawelawe autonomous unmanned. Hiki i nā mīkini palekana lehulehu o ka robot ke hōʻoia i ka palekana o nā limahana a me nā robots i ke kaʻina o ka hoʻokele autonomous.
❑ Hoʻouka iā ʻoe iho
ʻO ka ʻenehana ʻenehana laser SLAM multi-layer material box picking latent AGV robot hiki ke hoʻomaopopo i ka hana hoʻopiʻi ponoʻī. I ka pau ʻana o ka mana o ka lopako, ʻōlelo ka leo i ka lawa ʻole o ka mana, a e hele ʻokoʻa ka lopako i ke kūlana o ka hoʻouka ʻana e like me ke kauoha i hoʻopuka ʻia e ka ʻōnaehana hoʻouna. Hoʻopili maikaʻi ʻia ke awa hoʻoili o ka robot me ka puʻu hoʻopiʻi e hoʻomaka ai e hoʻopaʻa. Loaʻa i ka lopako kahi kaʻapuni pale hoʻopaʻa paʻa i kūkulu ʻia e hōʻoia i ka mālama pono ʻana. Ma hope o ka hoʻopiha piha ʻana, e hoʻopau koke ka robot i ka hoʻouka ʻana.

❑ Palekana palekana
ʻO ka ʻenehana ʻenehana laser SLAM multi-layer material box picking latent AGV robot he mau hana palekana palekana e hōʻoia i ka hana palekana a hilinaʻi o nā limahana a me ka ʻōnaehana holoʻokoʻa.
❑ Hoʻokele palekana loa
ʻO ka ʻepekema ʻenehana a me ka ʻenehana laser SLAM multi-layer bin picking latent AGV robot i kūkulu ʻia me ka SRC controller i hoʻomohala ʻia e Xiangong Intelligence, e hāʻawi ana i ka robot i nā hana maʻamau e like me ke kūkulu ʻana i ka palapala ʻāina, ka hoʻonohonoho ʻana, ka hoʻokele, ka hoʻonohonoho ʻana i nā mīkini he nui, ka hoʻouka ʻana, 3D obstacle. ʻO ka pale ʻana, a me nā mea ʻē aʻe, ʻike i ka hoʻokele palekana super, pale i ka palekana o nā limahana, a kūpono hoʻi no ka paʻakikī kanaka-mīkini hui pū ʻia, ʻoi aku ka naʻauao a me ka maikaʻi.
❑ Hiki ke kani a me ka ʻike maka a me ka hoʻokō leo
Hāʻawi ka ʻenehana ʻenehana laser SLAM multi-layer bin picking latent AGV robot i kahi hana audible a ʻike maka, a hiki i nā mea hoʻohana ke ʻike i ke kūlana hana o ka robot i ka manawa maoli ma o ka ʻike audible a me ka ʻike maka.
❑ Hoʻomalu palekana hoʻomaha ulia pōpilikia
I mea e hōʻoia ai i ka palekana o ka lopako a me nā mea hoʻohana, ua hoʻolako ʻia ke kino lopako me nā pihi hoʻomaha pilikia ʻehā, aia ma ka ʻaoʻao hema a me ka ʻākau hope o ka pūpū chassis, a ma nā ʻaoʻao ʻelua o nā kolamu hāpai hema a me ka ʻākau. ʻO ka palekana palekana palekana hiki ke hoʻonui i ka palekana o nā limahana a me nā mea hana i nā pilikia ulia pōpilikia. E kaomi i ke pihi hooki pilikia no ka hoʻomaka ʻana i ka pale palekana hoʻomaha ulia pōpilikia, a hoʻohuli i ke pihi ma ka uaki no ka hoʻihoʻi ʻana i ke pihi hoʻomaha pilikia.
❑ Hapai i ka pale
Hoʻohana ʻia ka hāmeʻa hoʻopili electromechanical anti-falling, aia ma lalo o ke kolamu hoʻokiʻekiʻe ma ka ʻaoʻao ʻākau o ka robot, e pale i ka hāpai ʻana a me ka hāʻule ʻana i ka wā e hoʻoponopono ai nā limahana mālama i ka robot. Ke hoʻohuli ʻia ka hoʻololi ʻana i ka hāʻule ʻana i ke kūlana "lifting locking", ke komo nei ka mīkini hoʻokiʻekiʻe robot i ke kūlana laka, hoʻopau ke ʻano hoʻokiʻekiʻe, a ʻoki ʻia ke kaapuni uila e hāʻawi i ka pale palekana ʻelua. I ka huki ʻia ʻana o ka mea hoʻololi anti hāʻule hāʻule i ke kāʻei "hoʻokiʻekiʻe wehe", hoʻomaka ka kaʻa hāpai i ka hana hāpai maʻamau. Ke hoʻokō nā limahana mālama i ka mālama maʻamau a me ka hoʻoponopono pilikia ma ka robot, pono lākou e hoʻohuli i ka hoʻololi anti falling lifting i ke kūlana "lifting lock" e pale aku ai i ka hāʻule ʻana a pale i ka palekana o nā limahana.
❑ Palekana ʻino
ʻO nā ʻaoʻao mua a me hope o ka chassis o ka ʻenehana ʻenehana laser SLAM multi-layer bin picking latent AGV robot ua lako pū me nā pilina palekana no ka pale ʻana o ka lopako, hiki ke pale pono i ka palekana o ka lopako a me nā limahana. I ka haʻahaʻa ʻana o ka pale ma mua o ke kiʻekiʻe o ka ʻike ʻana o ka module pale pale radar laser, hiki ke pā i ka pilina palekana o ka robot. I ka wā e paʻi ai i kahi pilikia, paʻi ʻia ka pilina palekana a hoʻouna ʻia ka ʻike i ke kaapuni hoʻomalu, a hoʻomaha ka robot pilikia a komo i ke ʻano palekana palekana. I kēia manawa, ua paʻa ke kukui ʻulaʻula luna no ka manawa lōʻihi, aia nā kukui hōʻailona mua a hope o ka chassis, a hoʻouna ka buzzer i kahi kani hoʻokani pila mau, me ka leo wikiwiki.
❑ Kūkākūkā pūnaewele
Kākoʻo ka ʻenehana ʻenehana laser SLAM multi-layer bin e koho ana i ka latent AGV robot i ka Wi Fi a i ʻole 5G a me nā ala kamaʻilio ʻē aʻe. Hiki ke hoʻopili ʻia i ke kahua hoʻokele naʻauao ma o ka pūnaewele uea, hiki ke nānā i ke kūlana hana a me ke kūlana olakino o ka robot i ka manawa maoli. Ke hiki mai kahi ʻokoʻa, hōʻike ka robot i ka ʻike ʻokoʻa i ka platform hoʻokele naʻauao ma o ka pūnaewele, a hiki i nā ʻenehana ke hoʻoponopono i ka pilikia e like me ka log exception a me nā ʻike ʻē aʻe.
❑ Hooponopono naauao
ʻO ka ʻenehana ʻenehana laser SLAM multi-layer bin e koho ana i ka latent AGV robot he lopako naʻauao loa e kākoʻo ana i ke komo ʻana i ka paepae hoʻokele naʻauao a me ka paepae hoʻokele ʻaoʻao ʻekolu. ʻO ke kahua hoʻokele naʻauao ka lolo naʻauao o ka robot, hiki ke hoʻopili me ka ʻōnaehana hoʻokele o waho, kaʻina hana i nā kaʻina ʻoihana kūpono, hana i ka ʻikepili ʻikepili a me ka hoʻokele ʻike; E hōʻoia i ka hoʻonohonoho manawa maoli o nā robots he nui a me nā lako logistic like ʻole, e ʻike i ka wānana a me ka nānā ʻana i ke olakino ʻōnaehana, a hoʻopaʻa i ka ʻōnaehana ma muli o ke aʻo hoʻoikaika a me ke aʻo hohonu. Hiki i ke kahua hoʻokele naʻauao ke hoʻomaopopo i ka hale kūʻai naʻauao, hale kūʻai a me nā hana ʻē aʻe. Pono ka mea hoʻohana e kaomi i ke pihi hana ma ka polokalamu polokalamu, a e hoʻopau kūʻokoʻa ka robot i nā hana like ʻole o ke kauoha ma lalo o ka ʻōnaehana hoʻonohonoho.
ʻO ka laser SLAM multi-layer bin robot mua i hoʻokuʻu ʻia e HEGERLS a me HAIROO Innovation e pāʻani nui i ka lawelawe ʻana i ka ʻaoʻao laina, e hoʻokō i ka docking maʻalahi ma waena o nā lako hana a me ka hana kūpono o nā bins, a hana i ka waiwai nui no nā mea kūʻai. I ka manawa like, i ka hoʻolālā hana hou ma waena o HEGERLS a me HAIROO, ua hoʻolauna pū ʻo HEGERLS i kekahi mau ʻano o nā robots Kubao: multi-layer bin robot HEGERLS A42, pālua pahu pahu hohonu HEGERLS A42D, pahu pahu pahu HEGERLS A42N, telescopic lifting bin robot HEGERLS A42T, e uhi mālie ana i nā hiʻohiʻona noiʻi like ʻole o nā robots mālama pahu, e kālele ana i ka hoʻoponopono ʻana i nā wahi ʻeha o ka mālama ʻana, a me ka hāʻawi ʻana i nā mea kūʻai aku me ka hoʻonui waiwai. I ka wā e hiki mai ana, e hoʻomau ka ʻimi ʻana o nā ʻaoʻao ʻelua i nā mea hou aʻe o ka hana akamai a me nā hale kūʻai akamai e hoʻokō ai i ka hoʻomohala maʻamau.
Ka manawa hoʻouna: Nov-02-2022